- · 《决策与信息》栏目设置[09/01]
- · 《决策与信息》数据库收[09/01]
- · 《决策与信息》投稿方式[09/01]
- · 《决策与信息》征稿要求[09/01]
- · 《决策与信息》刊物宗旨[09/01]
一、本刊要求作者有严谨的学风和朴实的文风,提倡互相尊重和自由讨论。凡采用他人学说,必须加注说明。 二、不要超过10000字为宜,精粹的短篇,尤为欢迎。 三、请作者将稿件(用WORD格式)发送到下面给出的征文信箱中。 四、凡来稿请作者自留底稿,恕不退稿。 五、为规范排版,请作者在上传修改稿时严格按以下要求: 1.论文要求有题名、摘要、关键词、作者姓名、作者工作单位(名称,省市邮编)等内容一份。 2.基金项目和作者简介按下列格式: 基金项目:项目名称(编号) 作者简介:姓名(出生年-),性别,民族(汉族可省略),籍贯,职称,学位,研究方向。 3.文章一般有引言部分和正文部分,正文部分用阿拉伯数字分级编号法,一般用两级。插图下方应注明图序和图名。表格应采用三线表,表格上方应注明表序和表名。 4.参考文献列出的一般应限于作者直接阅读过的、最主要的、发表在正式出版物上的文献。其他相关注释可用脚注在当页标注。参考文献的著录应执行国家标准GB7714-87的规定,采用顺序编码制。
自动驾驶仿真测试关键技术「AI工程论」
作者:网站采编关键词:
摘要:关注:决策智能与机器学习,深耕AI脱水干货 来源 |线束世界 报道 |自动驾驶测试验证技术创新论坛 智能网联汽车(Intelligent and Connected Vehicle, ICV)是指搭载先进的车载传感器、控制器、执
关注:决策智能与机器学习,深耕AI脱水干货
 来源 |线束世界
来源 |线束世界
报道 |自动驾驶测试验证技术创新论坛
智能网联汽车(Intelligent and Connected Vehicle, ICV)是指搭载先进的车载传感器、控制器、执行器等装置,以车辆为主体和主要节点,并融合现代通信与网络技术,具备复杂环境感知、智能化决策、自动化控制功能,使车辆与外部节点间实现信息共享与控制协同,实现“零伤亡、零拥堵”,达到安全、有序、高效、节能行驶的下一代汽车。依照规划的路线图,在2020年,我国需掌握智能辅助驾驶总体技术和各项关键技术,到2025年,需掌握自动驾驶总体技术和各项关键技术。
智能网联汽车的关键技术主要包括环境感知技术、智能互联技术和数据驱动的智能应用技术,产业链涉及汽车、电子、通信、互联网、交通等多个领域,主要包括芯片厂商、传感器厂商、汽车电子/通信系统供应商、整车企业、平台开发和运营商以及内容提供商。
智能网联汽车包括智能化和网联化两个技术层面,相应的分级说明如下:
智能化分级:
1,DA(Driving Assistant),驾驶辅助
2,PA(Partial Autonomous),部分自动驾驶
3,CA(Conditional Autonomous),有条件自动驾驶
4,HA(Highly Autonomous),高度自动驾驶
5,FA(Fully Autonomous),完全自动驾驶
网联化分级:
1,网联辅助信息交互
2,网联协同感知
3,网联协同决策与控制
传统的汽车测试方法不能满足智能网联汽车的开发和认证需求,需要开发全新的测试评价方法体系以及支撑工具平台,智能网联汽车相关的标准和法规的建设,以及测试评价和系统验证方法的推广执行是推动智能网联汽车真正落地的重要组成部分。
 智能网联汽车面临近乎无限的运行场景,为厂商和测试机构提出了巨大的挑战。在面对实际道路上各种交通标识、道路参与者、路面标识、基础设施、道路类型、交通参与者和瞬息万变的交通行为,智能网联汽车需要有极强的环境变量感知能力,智能决策能力,车辆控制能力。
智能网联汽车面临近乎无限的运行场景,为厂商和测试机构提出了巨大的挑战。在面对实际道路上各种交通标识、道路参与者、路面标识、基础设施、道路类型、交通参与者和瞬息万变的交通行为,智能网联汽车需要有极强的环境变量感知能力,智能决策能力,车辆控制能力。
智能网联汽车的测试内容可以分为模型在环测试、软件在环测试、硬件在环测试、驾驶模拟器测试、车辆在环测试、封闭试验场测试和开放道路测试。下面简要介绍下智能网联汽车测试评价中比较重要的智能驾驶仿真测试,网联测试,以太网测试和关键零部件的测试。
智能驾驶仿真测试
智能驾驶仿真测试主要包括MiL(Model in Loop,验证控制算法模型是否准确实现了功能需求,相当于对算法的仿真),SiL(Software in Loop,验证代码实现的功能是否与模型一致,是对依照算法产生的代码进行仿真验证),HiL(Hardware in Loop,在整套硬件系统上验证代码实现的功能是否与需求定义一致,是进行整车仿真测试和实车路试前重要的验证环节)。仿真测试(关键部件/系统和整车)、封闭场地路试和实际场景路试需要紧密结合在一起,基于场景库来梳理云-路-端的闭环关系。智能网联汽车测试评价的重点在于软件层和系统集成这两个维度,“仿真”+“系统原型”,针对难点进行故障注入。把多种验证手段进行有效的组合才能有效的完成智能网联汽车的验证评价工作。
 以下简要介绍下HiL仿真测试的系统组成,整个系统由以下组成部分:
以下简要介绍下HiL仿真测试的系统组成,整个系统由以下组成部分:
· 视频注入模块
· 多方向多目标毫米波雷达模拟器
· 超声波雷达模拟器
· 激光点云仿真
· 交通流联合仿真
· 高级快速原型ARCP(Advanced Rapid Control Prototype)
· 驾驶模拟器及环幕
通过以上系统,可以实现智能驾驶全传感器融合的算法验证
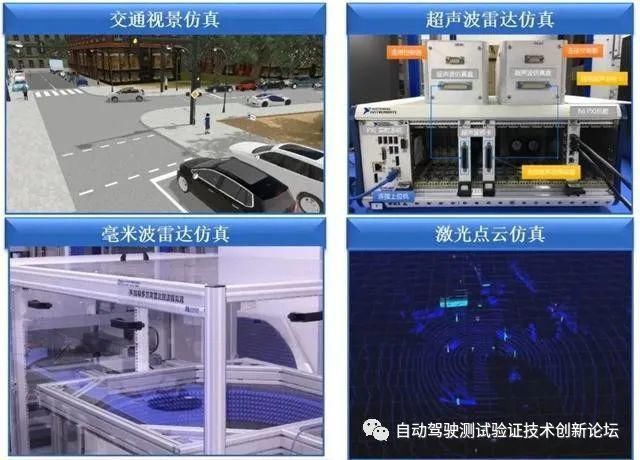 应用场景仿真软件,可以实现复杂道路交通环境仿真,提供多种雨、雪、雾等复杂天气模拟:
应用场景仿真软件,可以实现复杂道路交通环境仿真,提供多种雨、雪、雾等复杂天气模拟:
 毫米波回波模拟系统:
毫米波回波模拟系统:
 激光雷达点云仿真:
激光雷达点云仿真:
 六自由度驾驶模拟:
六自由度驾驶模拟:
 智能驾驶仿真测试的关键一环是搭建典型道路的场景库,从而浮现宏观及微观交通流,设置各类测试场景,以实现精细化测试:
智能驾驶仿真测试的关键一环是搭建典型道路的场景库,从而浮现宏观及微观交通流,设置各类测试场景,以实现精细化测试:

文章来源:《决策与信息》 网址: http://www.jcyxxzz.cn/zonghexinwen/2020/0915/375.html
上一篇:如何正确选择交易系统信号?
下一篇:烽火通信科技股份有限公司股权激励限制性股票